Self-Balancing Robot:
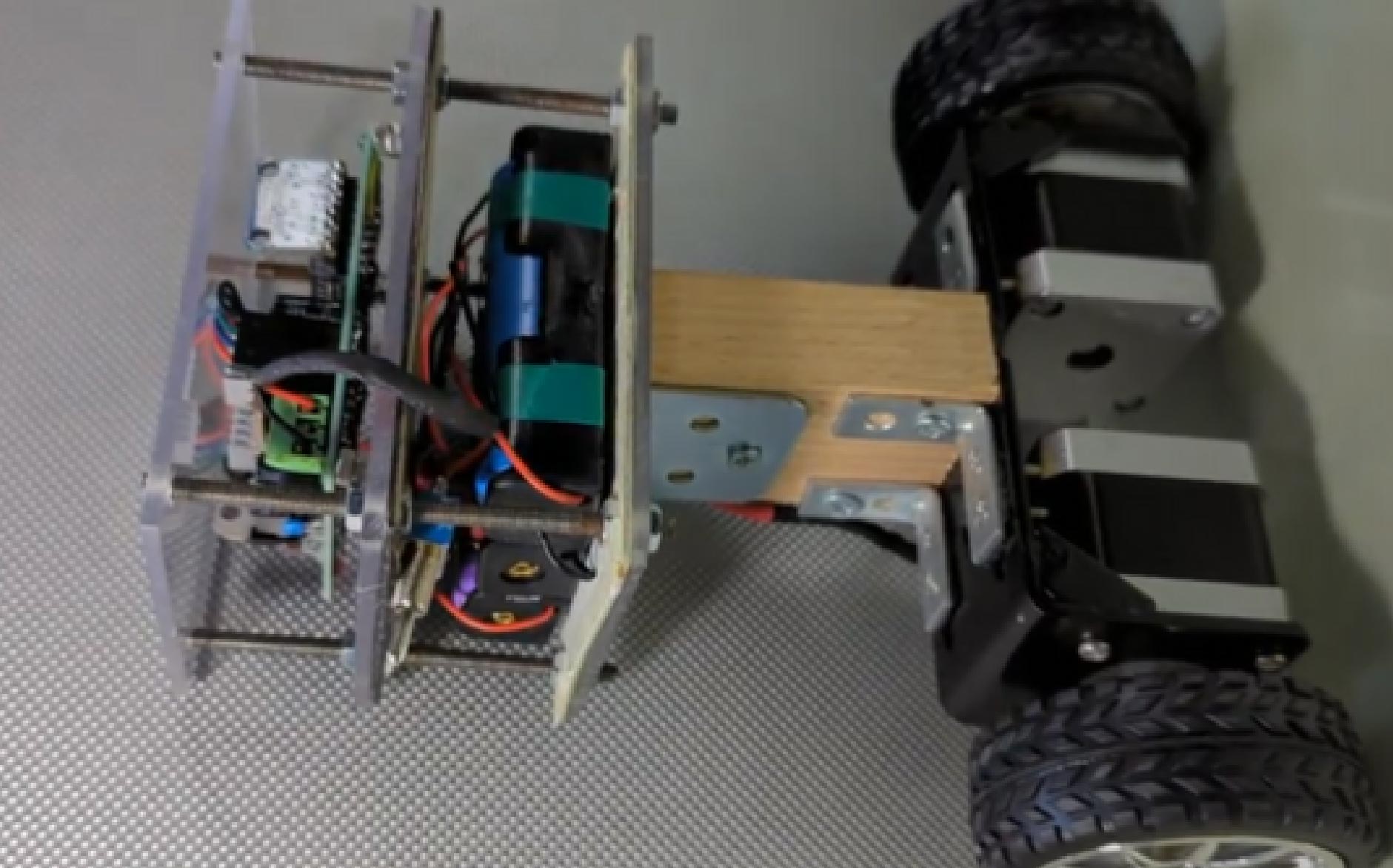
Designed a self-balancing robot using a custom-designed PCB, which integrates a gyroscope and accelerometer. The project involved scratch programming and precision engineering to achieve autonomous stability.

Designed a self-balancing robot using a custom-designed PCB, which integrates a gyroscope and accelerometer. The project involved scratch programming and precision engineering to achieve autonomous stability.